还有自带模块,可是一般都直接就给个改换矩阵让人不流畅难明。本文共享学习了解与推导进程。
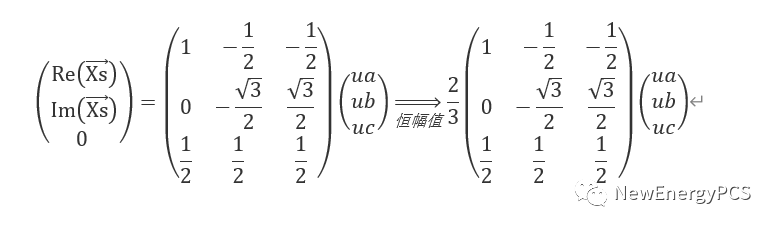
abc 体系转换为αβ体系的改换便是Clarke改换。在上面的剖析中旋转矢量的长度持平,得到Uα,Uβ的幅值是3/2,通过调整Clarke改换中的系数,能调整abc 体系与αβ体系中的幅值巨细持平,功率持平,有效值持平。被称为恒幅值改换,恒功率改换,恒有效值改换。
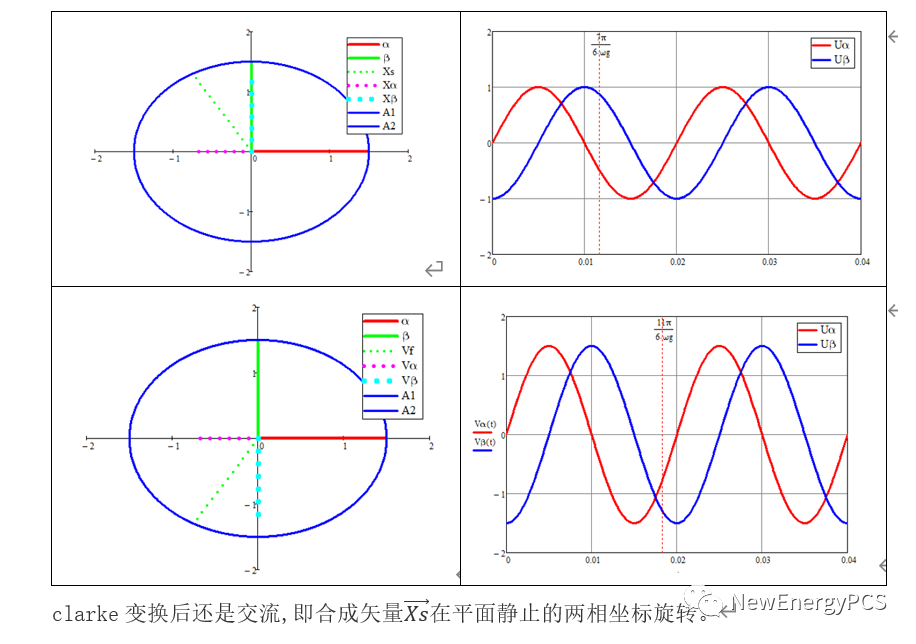
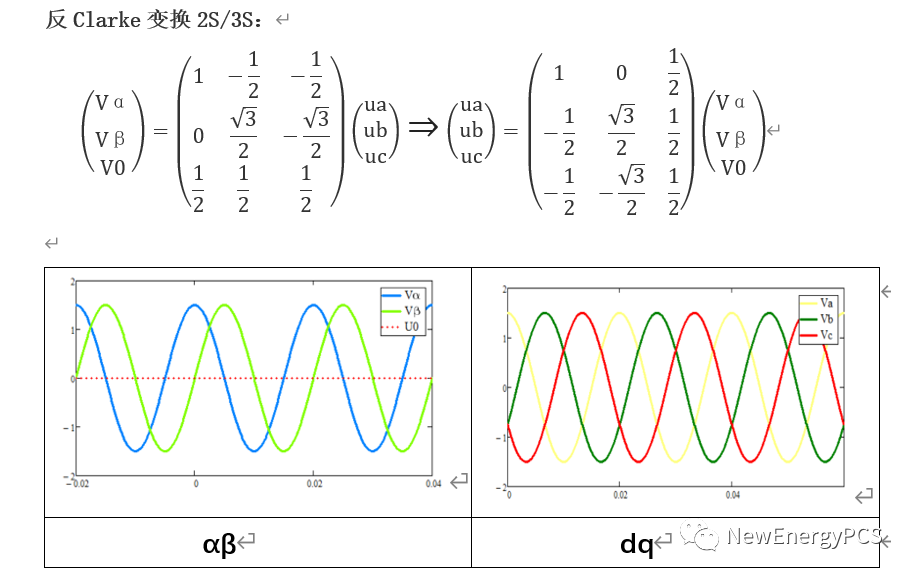
通过上式运用mathcad建立ABC三相停止坐标与αβ 0两相停止坐标。三相对称时零轴重量为0 。
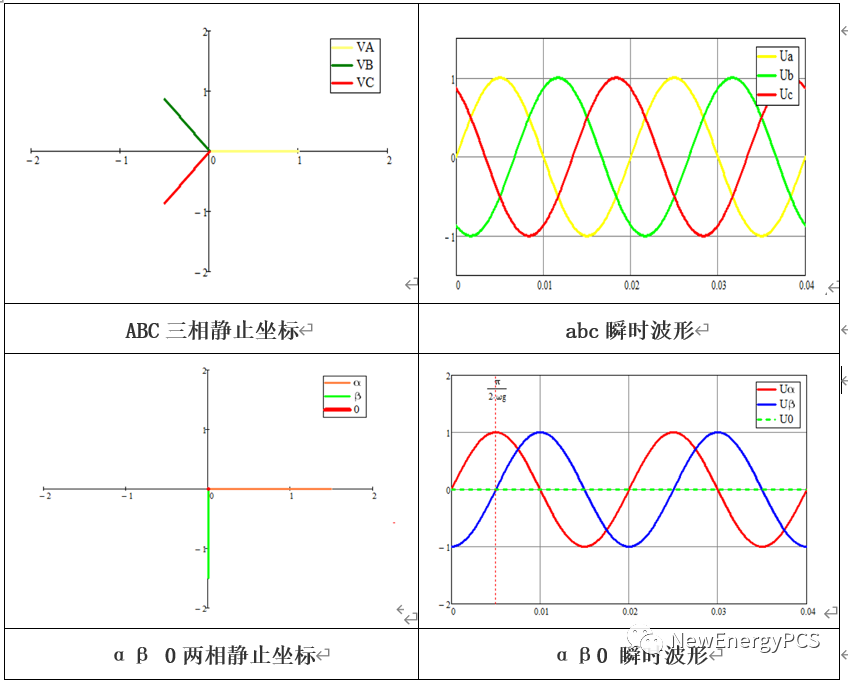
留意上图运用sin正弦量用正序A B C作 3S/2S改换,发现波形上Uα超前Uβ 90°。与咱们界说的αβ 0两相停止坐标,β轴超前α 90°相反。这里有两种办法修正模型,其一是咱们修正sin正弦量把本来的正序改为负序A C B。
通过修正相序后需求修正clarke改换矩阵第二行的元素反号,即更改为了习气的逆时针旋转。
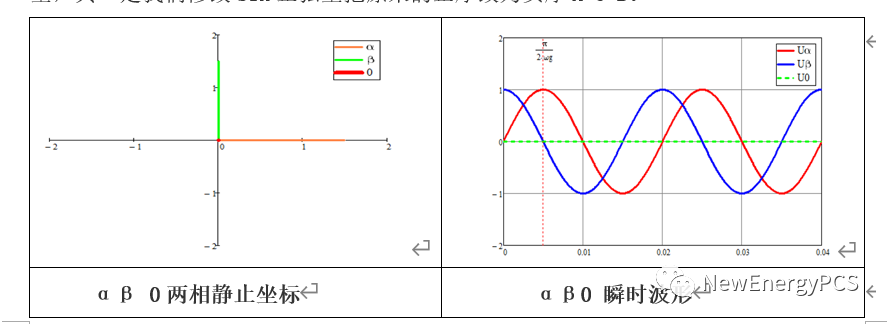
在这里声明参阅MATLAB官网的参阅文档,就暂时不修正相序,但也默许β轴超前α90°,运用mathcad可得如下波形图矢量图。
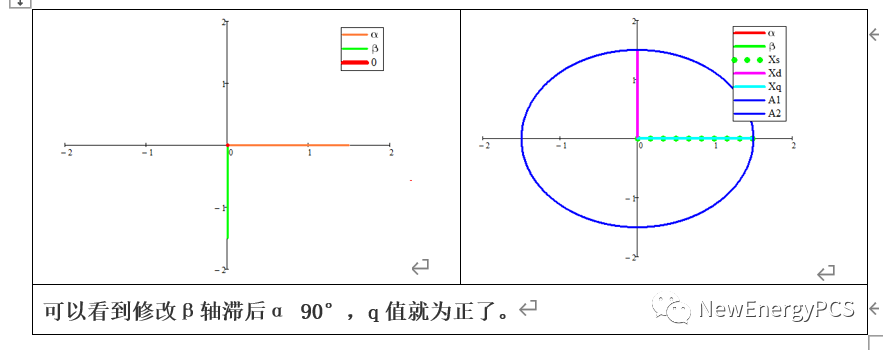
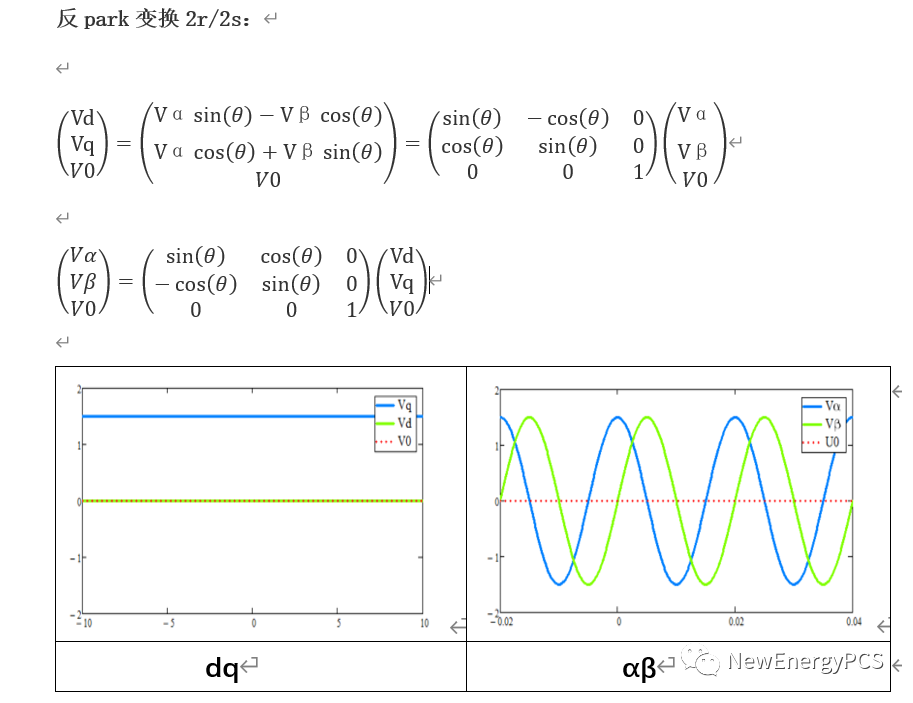
假如将本来平面停止的两相坐标以同平面旋转矢量相同的角速度旋转起来与其相对停止,这时本来的旋转矢量能够看做是相对于坐标停止的直流重量。称这两重量为d,q重量。而且界说q轴超前d轴90°。2s/2r park改换既然是旋转改换,就存在对齐问题与旋转方向问题。那么就有α轴对齐d轴称为d轴定向,或许α轴对齐q称为q轴定向。
通过用d轴定向park改换矩得到了直流重量,但q轴重量为负,(从d轴定向的矢量图看,q轴应该为正,应为q轴超前d轴90)。发生这个成果的原因是在clarke改换时,默许了β轴超前α90°。而实际上clarke改换时β轴滞后α 90°。
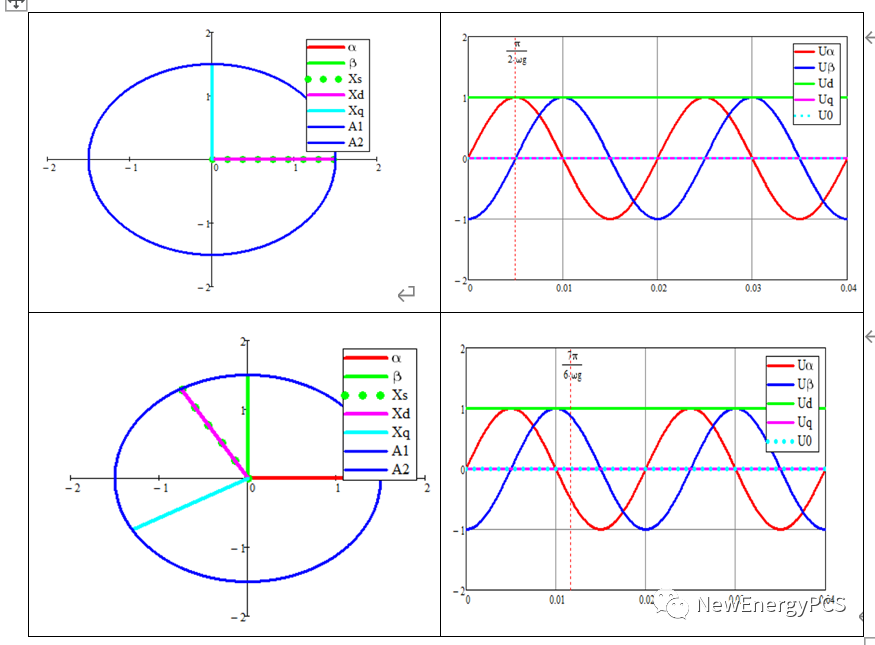
运用不同的界说会有不同的clarke park改换矩阵,就需求做些匹配:如Clarke改换中正序改负序,锁相环(PLL)输出相角与park矩阵中的θ匹配。即PLL输出视点作为park矩阵的θ视点时需求偏移90°。那么就要判别三相体系为“正弦方法”或“余弦方法”,调查体系三相波形与PLL输出相位特征来判别。
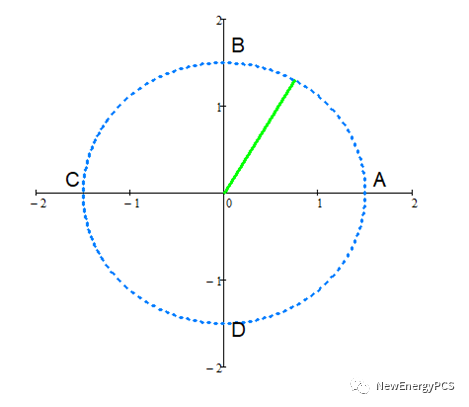
上图为物理中描绘物体简谐运动的旋转矢量法暗示图。当旋转矢量的初始方位为图中A点时,矢量旋转一周其值将阅历A\\B\\C\\D的巨细改变;当旋转矢量方位为图中D点时,,矢量旋转一周其值将阅历D\\A\\B\\C的巨细改变;此处称A点初始方位为余弦方法,D点为初始方位时为正弦方法。
三相体系(abc坐标系)的时域重量转换为正交停止坐标系(αβ)中的两个重量。被称为3S/2S,(三相停止坐标转换为二相停止坐标)即clarke改换。将αβ坐标系中的两个重量转换为一个正交旋转坐标系(dq)。也被称为2s/2r,(二相停止坐标转换为二相旋转坐标系)即park改换。接连完成这个两个改换可将沟通电流和电压转换为直流信号然后简化核算,根本原因仍是常用的操控器是经典的PI调理器,PI调理器能够对直流量进行无净差调理,而沟通量不可,所以将三相沟通重量转化为两项直流重量做操控。
因为PI操控器输出是直流量, 那么就发生了上述相反的改换需求,即反park改换2r/2s,反park改换2S/3S。接连完成这个两个改换可将直流电流和电压转换为沟通信号,再将沟通信号提供给PWM模块作为参阅信号从而操控。
,具体的图表暗示,是初学FOC,预备自己手写FOC库或许了解FOC算法的工程师的有利手册,手册中也简略介绍了
一下,现有矩阵udq=C x uabc,idq=C x iabc,其间C代表
公式。(1)假定功率不变P=udqT x idq=uabcT x iabc=CT x C
与化简(1) /
与化简(2) /
系上的重量,咱们要留意现在得到的仍是正弦信号,既不是阶跃信号,也不是斜坡信号。
的开展,现已脱离了沟通电机磁链轨道操控的本意,形成了电力电子技术中的一类PWM操控方法。
的基本概念 /
,因而没有操控环路的PID环节,为了简洁输入直接给定dq值,通过park 和clark
实例 /
是变流器操控根底,其完成流程大致为,判别组成矢量地点扇区,核算相邻矢量效果时刻,核算各桥臂导通时刻,得到各相PWM占空比,更新相应寄存器值。
操控完成 /
全国大学生智能轿车比赛全向跋涉组 #pcb规划 #嵌入式开发 #电子制造
运用 ESP32 和 TensorFlow Lite 的语音操控机器人